Scheepskompas - het berekenen van de variatie en deviatie
 Ook in deze “hightech” tijden is en blijft het scheepskompas een onmisbaar onderdeel van je schip om veilig van A naar B te varen.
Ook in deze “hightech” tijden is en blijft het scheepskompas een onmisbaar onderdeel van je schip om veilig van A naar B te varen.
Helaas moet de koers die je berekend hebt op je papieren of elektronische zeekaart gecorrigeerd worden met externe magnetische invloeden ttz. variatie en deviatie.
De eerste fout : is de variatie die veroorzaakt wordt door magnetische velden op de aarde. Dit is dus plaats- en tijdsgebonden.
De tweede fout : de deviatie is de tweede fout op je kompas en deze wordt veroorzaakt door de omgeving op je schip zelf (o.a door metaal en elektronica). De deviatiefout is afhankelijk van je koers. Commerciële schepen en beroepsschepen moeten hun kompas laten afregelen door een erkende “compass adjuster “. ( zie foto ) Ook voor niet commerciële schepen is dit absoluut aan te raden.
Ondanks de afregeling blijven er kleine fouten bestaan die gerapporteerd worden op een deviatietabel.
Een variatie en deviatie geeft een totale fout (hier later “error “ genoemd) op je kompas die je moet corrigeren.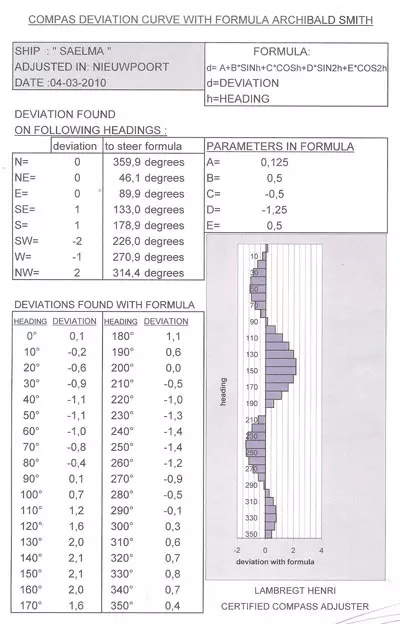 Is het belangrijk om rekening te houden met deze fouten?
Is het belangrijk om rekening te houden met deze fouten?
Een fout van 2 graden geeft op een afstand van 10 mijlen een verschil van 600 m.
Een fout van 4 graden geeft op 10 mijlen een verschil van 1.200 m.
Aan onze Belgische kust is de variatie momenteel zo goed als nul.
Een paar voorbeelden van variatie op andere plaatsen :
• Adriatische zee : 4° O
• Canarische eilanden 4° W
• Caraïben : 10° W
Wijsneuzen zullen mij zeggen dat je niet kan sturen op 1 of 2 graden na. Dat is juist maar als men streeft om te sturen naar een juiste berekende koers en men aanneemt dat de stuurfouten van een paar graden meestal aan beide kanten zullen plaatsvinden dan zal het gemiddelde toch nog redelijk correct zijn.
Het is dus wel belangrijk om de variatie en deviatie te berekenen .
Er bestaan veel methodes en geheugensteuntjes om een variatie en deviatie te berekenen.
De methode die ik gebruik is heel eenvoudig.
Meestal wil men een berekende koers van de zeekaart naar het kompas brengen :
- Als de “ error “ west is dan gebruik je de formule “ error west – compass best “ en betekent dat je de fout moet bijtellen.
- Als de "error east" is dan gebruik je de formule “ error east – compass least “ en betekent dat je de fout moet aftrekken.
Zo simpel is het !
Moet je een berekening maken van kompas naar kaart, dan draai je de zaak gewoon om!
In theorie kan je ook de berekende ware grondkoers van je GNSS kaartplotter volgen. Dat is juist, maar moeilijker om manueel een rechte koers te houden omdat de reactietijd van de GNSS veel te traag is. Bovendien geeft de GNSS kaartplotter een grondkoers weer en niet de voorlegging.
Andere wijsneuzen zullen mij zeggen “ Ik hoef hier geen rekening mee te houden, want ik gebruik mijn automatische piloot met mijn elektronisch kompas”. De informatie van een elektronisch kompas is zoals een gewoon kompas ook magnetisch gebonden en moet dus ook gecorrigeerd worden.
Meestal kan je bij de instellingen, manueel de variatie invoeren en krijg je een true heading. ( persoonlijk zie ik daar het nut niet van in )
Opgelet: als je lange afstanden vaart moet je deze variatie (die plaatsafhankelijk is) regelmatig manueel aanpassen .
De deviatie fout van een elektronisch kompas kan je compenseren door een paar rondjes te varen (zie de handleiding van je toestel).
Wil je een elektronisch kompas dat automatisch steeds het ware noorden weergeeft dan moet je een apart satellietkompas kopen (opgelet : dit is niet de COG informatie die op je kaartplotter staat).
Commentaar of vragen hierover mail ons op nautinstruct@gmail.com